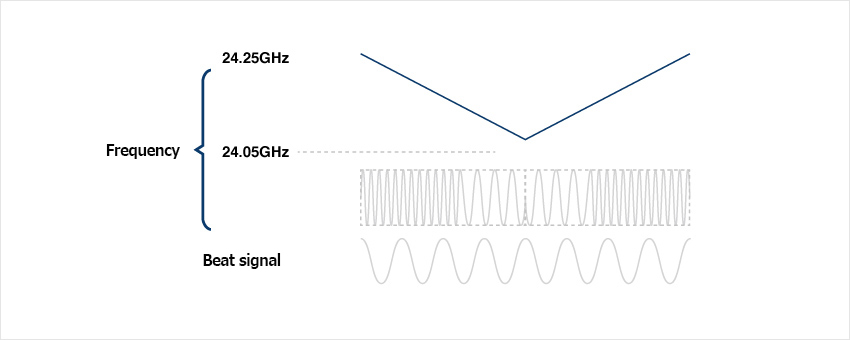
An FMCW sensor applies linear frequency modulation to the emitted signal. In this case, a beat signal with a frequency that corresponds to the distance can be obtained from the signal bounced back from a stationary or moving object. This is done by obtaining the phase difference between the reflected signal and part of the emitted signal.
The distance is obtained from the acquired frequency, because the distance frequency is determined by the sweep frequency and sweep time of the FM modulation.
Usually, even when there are multiple reflected signals it is possible to separate them for output as FFT is employed for processing the frequencies.
FMCW Sensor Principle
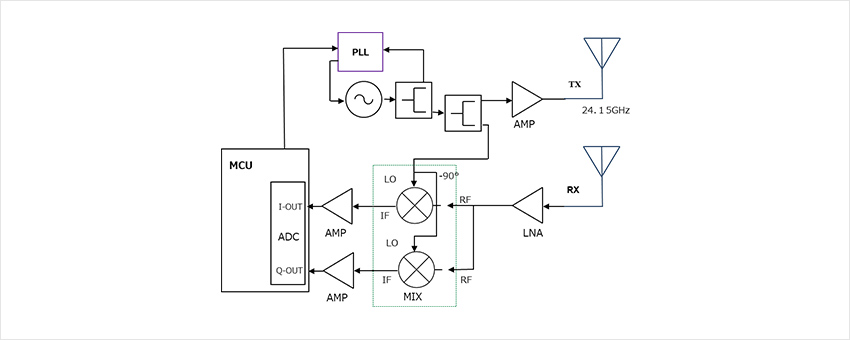
An FMCW sensor transmits frequency modulated signals. Our products generally use PLL for the FM modulator section, so they offer excellent frequency precision and linearity. Depending on the specific product and application, sweep direction is up, down, or up/down.
FMCW methodFMCW Sensor Functional Block Diagram
Phase detection is enabled by mixing the signal reflected by the target and the emitted signal, outputting a beat signal (IF signal). Beat signal frequency will vary according to the distance to the target based on the sweep frequency span and sweep time. Sweep frequency span and sweep time are used to calculate the distance to the target from the beat signal frequency.
With a single target there will be a single frequency, but if there are multiple targets the signal will be composed of multiple frequencies.
By applying FTT signal processing, these frequencies are then used to calculate the distance to each of the multiple targets.
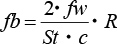
The beat frequency fb (Hz) is expressed by the following formula:
fb: IF beat frequency (Hz)
fw: sweep frequency span (occupied bandwidth, Hz)
St: sweep time (s)
c: speed of light 3 x 108 (m/s)
R: distance (m)
A special feature of the FMCW sensor is its ability to measure the distance to a stationary object. The minimum distance separation resolution will depend on the sweep frequency variation span of the FM signal. Sweep bandwidth and separation resolution dr (m) are obtained using the following formula:
c: speed of light 3 x 108 (m/s)
fw: sweep frequency bandwidth (Hz)
In the case of a 24GHz band sensor, Japan’s Radio Law allows sweeping up to 200MHz. Thus, the minimum separation resolution is 1.5 meters; this means the distances of any targets separated by at least 1.5 meters can be individually measured. It is not possible to resolve targets that are within 1.5 meters of each other.
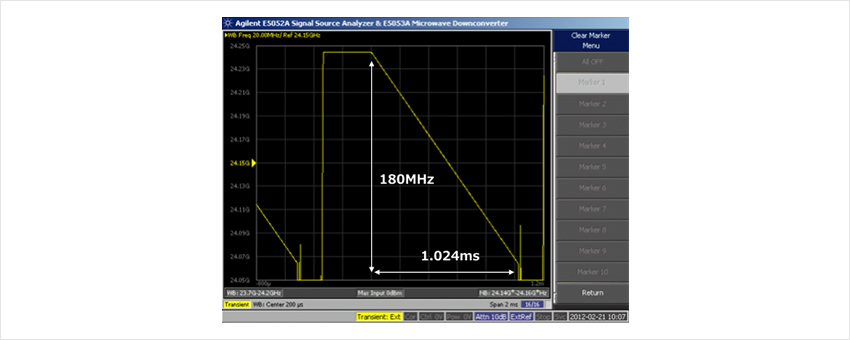
Result of measuring sweep frequency (sweep frequency bandwidth: 180MHz, sweep time: 1024us)
FMCW Sensor Features
It is possible to measure the distances of both moving and stationary objects.
It can be used to detect moving objects.
It is possible to detect moving objects within a limited distance by setting a threshold for each range.