FMCWセンサーの概略
FMCWセンサーは、送信波にリニアFM変調を加えています。その場合、静止している物や移動している物から反射した受信波を送信信号の一部を用いて位相検波させると、距離に応じた周波数のビート信号が出力されます。
FM変調の掃引周波数幅、掃引時間により距離周波数が決まるため、得られた周波数より距離を求めます。
一般的には、周波数はFFT処理を用いるので複数の反射波があった場合でも、各々分離して出力させることが可能です。




FMCWセンサーは、送信波にリニアFM変調を加えています。その場合、静止している物や移動している物から反射した受信波を送信信号の一部を用いて位相検波させると、距離に応じた周波数のビート信号が出力されます。
FM変調の掃引周波数幅、掃引時間により距離周波数が決まるため、得られた周波数より距離を求めます。
一般的には、周波数はFFT処理を用いるので複数の反射波があった場合でも、各々分離して出力させることが可能です。
FMCWセンサーは、FM変調をかけた信号を送信します。通常当社の場合FM変調部はPLLを用いているため、周波数確度やリニアリティに優れています。製品により異なりますが掃引方向は、ダウン掃引、アップ掃引、またはアップダウン掃引などあります。これらは用途により選択されます。
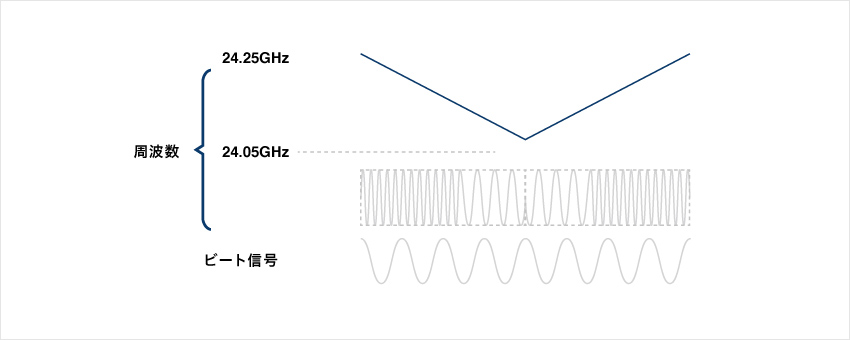
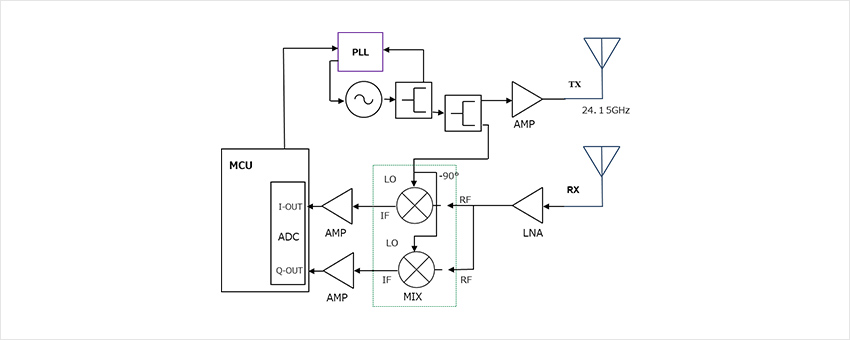
ターゲットによって反射された電波(受信波)と送信波をミキシングすることによって位相検波し、ビート信号(IF信号)として出力します。ビート信号周波数は掃引周波数幅と掃引時間により、ターゲットまでの距離に応じた周波数信号となります。掃引周波数幅、掃引時間によりビート信号の周波数から距離を求めます。
ターゲットが1つの場合は、1つの周波数となり、複数ある場合、複数の周波数が合成された信号となります。
これらの周波数をFFT信号処理にて、複数のターゲットまでの距離を算出します。
ビート周波数 fb(Hz)は、次式で表されます
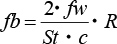
fb:IFビート周波数(Hz)
fw:掃引周波数幅(占有帯域幅)(Hz)
St:掃引時間(s)
c:光速 3×108(m/s)
R:距離(m)
FMCWセンサーの特徴は、静止物でも距離の計測が可能な点です。最小距離分離分解能は、FM波の掃引周波数変化幅に依存します。
掃引帯域幅と分離分解能 dr(m)は、次式で求めます。

c:光速 3×108(m/s)
fw:掃引周波数帯域幅(Hz)
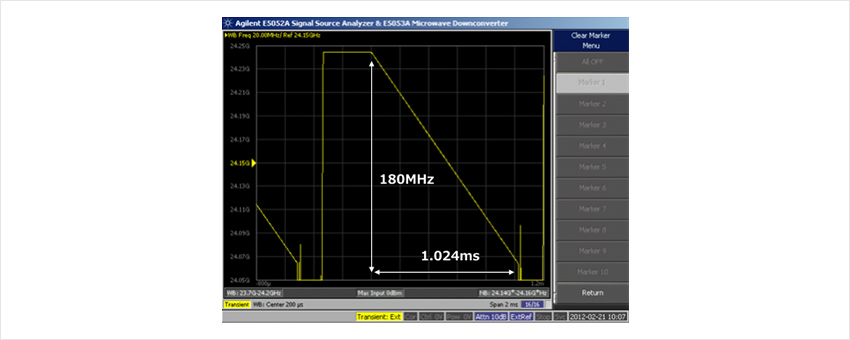
24Ghz帯のセンサーの場合、国内電波法では最大200Mhzまで掃引することが可能です。
従って、分離分解能は、最小1.5mとなります。1.5m以上離れているターゲットは分離されて計測できますが、1.5m以内の場合、各々分離することはできません。
24GHz帯 距離計測センサーモジュール -アナログ出力タイプ- 開発中