FMCW传感器概要
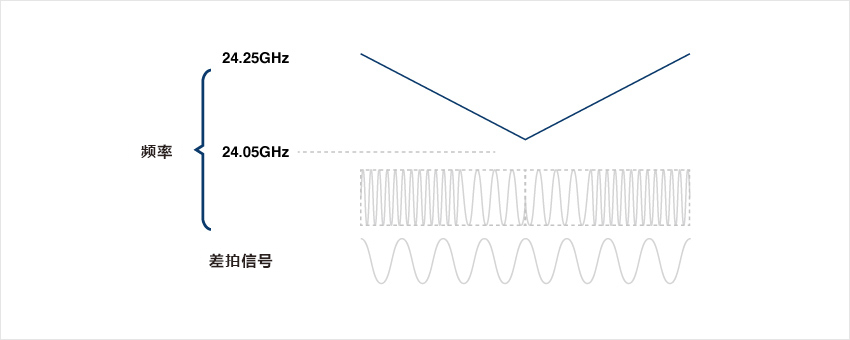
FMCW 传感器对发射信号加入了线性频率调制。在这种情况下,可以从静止或移动物体反射回来的信号中获得频率与距离相对应的差拍信号。这是通过获得反射信号和部分发射信号之间的相位差来完成的。
因为距离频率是由FM调制的扫描频率和扫描时间决定,所以距离可以从获取的频率来计算。
一般来说,采用 FFT 来处理频率,即使有多个反射信号,也可以将它们分开输出。
FMCW 传感器对发射信号加入了线性频率调制。在这种情况下,可以从静止或移动物体反射回来的信号中获得频率与距离相对应的差拍信号。这是通过获得反射信号和部分发射信号之间的相位差来完成的。
因为距离频率是由FM调制的扫描频率和扫描时间决定,所以距离可以从获取的频率来计算。
一般来说,采用 FFT 来处理频率,即使有多个反射信号,也可以将它们分开输出。
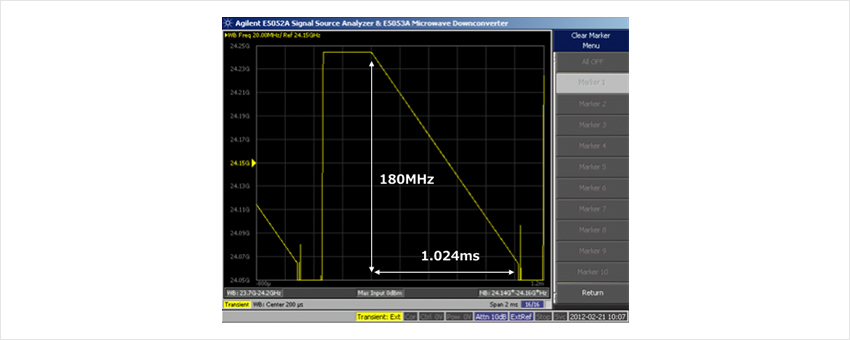
FMCW 传感器传输调频信号。我们的产品通常在 FM 调制器的位置使用锁相环,因此它们能提供出色的频率精度和线性度。根据不同的产品,有不同的向上、向下或向上/下扫描方向。视用途而定。
相位检测是将目标反射的信号和发射信号混合,输出差拍信号(IF 信号)。拍频信号频率根据扫描频率跨度和扫描时间,变换成目标距离的频率信号。通过扫描频率跨度和扫描时间得出目标的距离。
单个目标会有一个频率,但如果有多个目标,则信号将由多个频率组成。
这些频率通过应用 FTT 信号处理,可以计算多个目标中的距离。
拍频 fb (Hz) 由下公式表示:
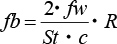
fb:中频拍频 (Hz)
fw:扫频跨度(占用带宽,Hz)
st:扫描时间(s)
c: 光速 3 x 108 (m/s)
R:距离(米)
FMCW 传感器的特征是能够测量静止物体的距离。最小距离分离分辨率将取决于 FM 信号的扫描频率变化跨度。
用以下公式获得扫描带宽和分离分辨率 dr (m):

c: 光速 3 x 108 (m/s)
fw:扫频带宽(Hz)
对于 24GHz 频段传感器,日本的无线电法最多可以扫描到 200MHz。因此,最小分离分辨率为 1.5 米。这意味着可以单独测量相距至少 1.5 米的任何目标的距离。但无法分辨彼此距离在1.5米以内的目标。