ドップラーセンサーの概略
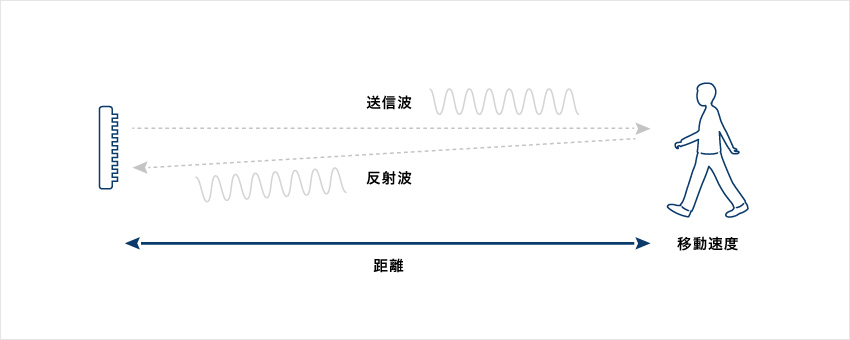
ドップラーセンサーとは、ドップラー効果を利用して物体の速度や動きの有無を検出するセンサーです。主に対象物の移動検知や速度計測に利用されています。
センサーから送信されるマイクロ波は、反射物が存在すれば反射してきます。送信した信号と反射してきた信号の位相差は、移動速度に応じた周波数となります。これをドップラー周波数と言います。このドップラー信号をIQ検波器という回路で検出し、その位相を調べることで、反射物の接近や離反を判断することができます。




ドップラーセンサーとは、ドップラー効果を利用して物体の速度や動きの有無を検出するセンサーです。主に対象物の移動検知や速度計測に利用されています。
センサーから送信されるマイクロ波は、反射物が存在すれば反射してきます。送信した信号と反射してきた信号の位相差は、移動速度に応じた周波数となります。これをドップラー周波数と言います。このドップラー信号をIQ検波器という回路で検出し、その位相を調べることで、反射物の接近や離反を判断することができます。
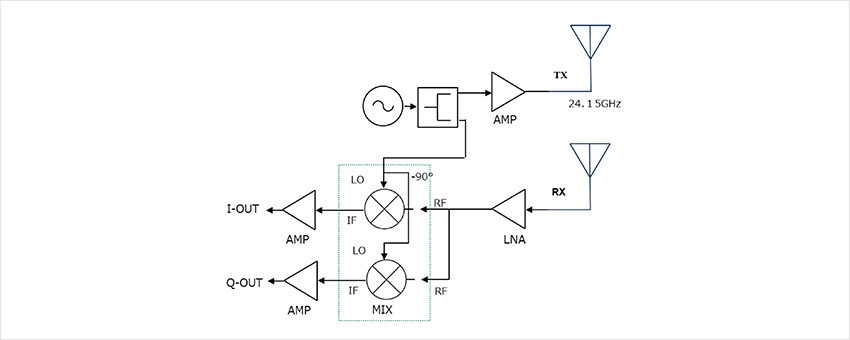
オシレータより発振された信号は、送信波となります。この一部を受信側ローカル信号として用いることで、位相検波器を構成します。ローカル信号は2つの信号に分配され、各々の出力は位相差90°を得るようにします。
送信アンテナより送信された電波は反射物がある場合、反射して受信アンテナより入力されます。
この微弱な信号をLNAにて増幅して位相検波器(IQ ミキサ)によりビート信号(IF信号)を得ます。
このビート信号の周波数は、速度を意味しており、大きさは反射物までの距離などに置き換えることも可能です。
IQ信号は、反射の状態(接近または離反)で位相状態が変わります。それにより移動方向が接近なのか、離反なのか識別することが可能です。
ドップラー方式の場合、送信信号はCW信号を用います。
ドップラー信号は、被測定物(ターゲット)の移動速度に比例した周波数の信号が出力されます。
ビート信号(fd)は、次式で与えられます。
※CW:無変調連続波(continuous wave)
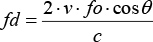
fd:ドップラー周波数(Hz)
V:ターゲットの移動速度(m/s)
fo:送信波周波数(Hz)
c:光速 3×108(m/s)
θ:ターゲットの移動する方向と観測する方向との角度
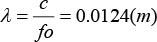
本センサーは、24GHz帯の送信波を用いるため、次式から fd(ドップラー周波数)=2v/0.0124mと表すことができます。
受信周波数はターゲットが近づいてくる場合には「+」、遠ざかっていく場合には「-」を表します。
角周波数で表すと次式となります。

本センサーは、IQ位相検波器を用いて、対象物で反射された反射波から位相がπ/2異なる二つのドップラー(I出力/Q出力)を出力します。ターゲットが近づいてくるときI出力はQ出力よりπ/2進んだドップラー信号として得られ、逆に遠ざかっていく場合には、π/2遅れた出力となります。信号処理により位相差の進み遅れを判定することで、ターゲットが近づいてくるのか、遠ざかっていくのか判別することができます。
反射波の大きさは、電圧振幅の大きさを用いて存在検知に利用します。その場合も移動している人などの速度に応じたドップラー周波数になります。人が居ても動いていない場合は、ドップラー信号は出ません。
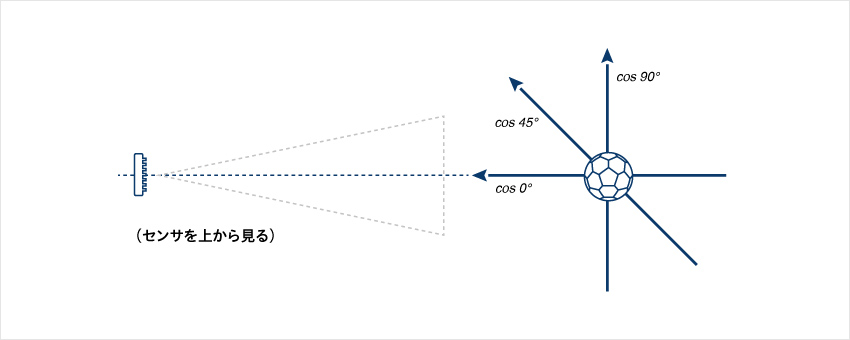
※ドップラーは「cos 90°」では出力されません
※計測角度による速度補正が必要となります