多普勒传感器概要
多普勒传感器可以检测移动物体的速度,并根据多普勒信号来检测入侵者的存在。
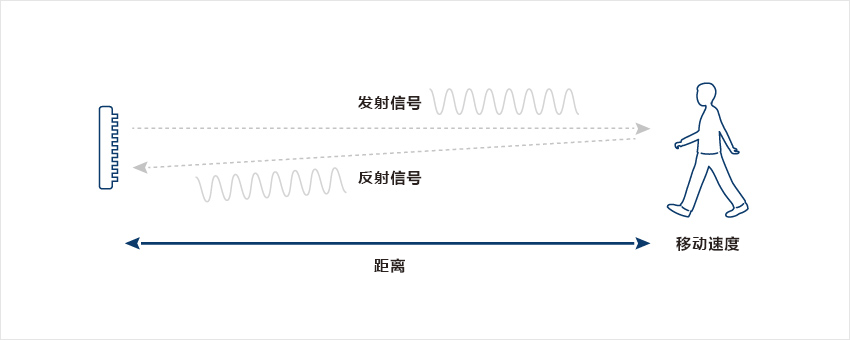
如果路径中有反射物体,则从传感器发射的微波会反弹。传输信号和反射信号之间的相位差表示了物体速度的频率。这称为多普勒或差频。该多普勒信号由称为 IQ 检测器的电路处理,从其相位可以确定反射物体是接近还是逐渐远离。
多普勒传感器可以检测移动物体的速度,并根据多普勒信号来检测入侵者的存在。
如果路径中有反射物体,则从传感器发射的微波会反弹。传输信号和反射信号之间的相位差表示了物体速度的频率。这称为多普勒或差频。该多普勒信号由称为 IQ 检测器的电路处理,从其相位可以确定反射物体是接近还是逐渐远离。
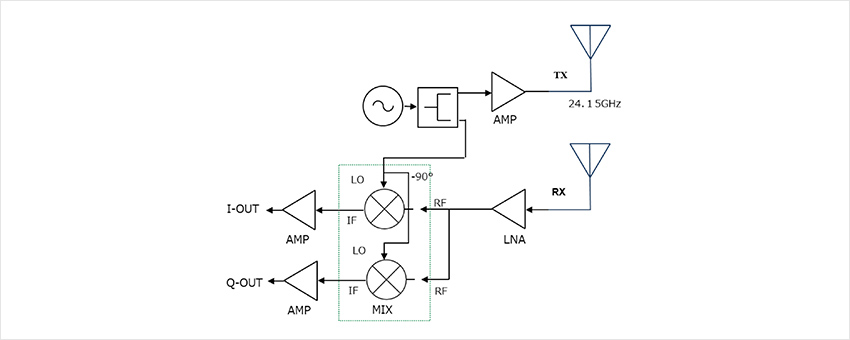
振荡器产生的信号就是传输信号。其中一部分在接收端作为本地信号处理,以构建相位检测器。本机信号分为两个信号,使每个输出的相位差为 90°。
如果路径中有反射物体,则从发射天线发射的无线电波会被反射回接收天线。该微弱信号使用 LNA(低噪声放大器)放大,由鉴相器(IQ 混频器)得出差拍信号(中频信号)。
这个差拍信号的频率代表了物体的速度,信号的大小意味着运动物体的距离。
IQ 信号的相位状态根据信号的反射方式而变化,从而可以确定物体是接近还是逐渐远离。
多普勒方法的情况下,会发射CW信号。
输出的差拍信号或多普勒信号的频率与移动物体(目标)的速度成正比。
差拍信号 (fd) 推导如下:
*CW 代表连续波
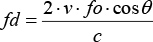
fd:多普勒频率 (Hz)
V:目标的移动速度(米/秒)
fo:发射信号频率 (Hz)
c: 光速 3 x 108 (m/s)
θ:目标移动方向与观察方向的夹角
由于该传感器在 24 GHz 频段传输,因此 fd(多普勒频率)= 2v / 0.0124 m 可以从以下等式导出:
接收频率在目标接近时显示为“+”,目标逐渐远离时显示为“-”。
可以用角频率表示成下面的算式:

该传感器使用 IQ 相位检测器输出两个多普勒信号(I 输出 / Q 输出),其相位与从物体反射回来的信号相差 π/2。当目标接近时,输出是比Q输出超前π/2的多普勒信号;相反,当物体逐渐远离时,它会延迟 π/2输出。因此,可以通过信号处理得出的相位差是提前还是延迟判断出目标是接近还是远离。
反射信号的幅度采用了电压幅度用于检测入侵者。在这里,多普勒频率也可用于测量移动者的速度。然而,人是静止的情况下不会有任何多普勒信号输出。
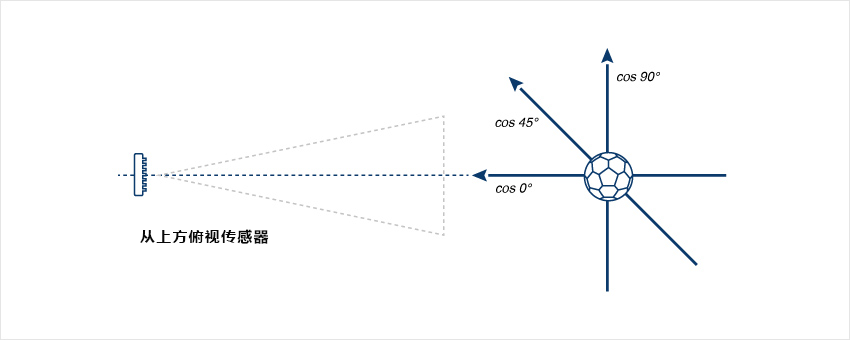
* cos 90°不会输出多普勒
* 速度需要针对测量角度进行校正